I still hear an annoying glitch through the speakers when the DÆ v3.0 Attenuator switches between steps twelve and thirteen!
In the previous blog I briefly described a revision to the circuit design of the v3.0 attenuator to introduce a delay in the relay switching between levels adding a make-before-break feature. I thought this would eliminate the annoying glitch I hear through the speakers when the volume level is increased or decreased and a change in attenuator levels is required. Recall that a v3.0 attenuator is made-up of levels with twelve steps each so a 24 step attenuator will include two levels.
The addition of the relay switching delay did not solve the problem. Hmm?
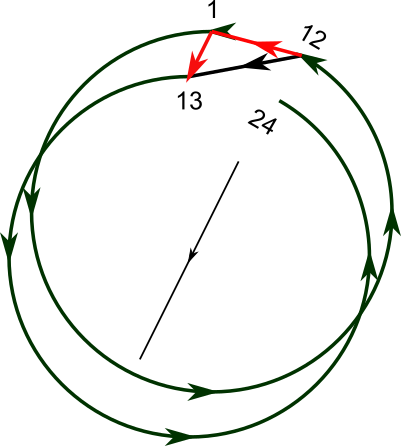
Circular Motion - Rotation of the yoke is counter-clockwise (CCW) from step 1 to 12. There is a level change and CCW rotation from step 12 to 13 and then the yoke rotation is CCW from step 13 to 24.
My most recent hypothesis is the glitch is caused by the design of the attenuator and specifically that the transition between levels twelve and thirteen requires two separate actions as shown in the figure to the right entitled “Circular Motion”. Notice that a volume increase from level twelve to thirteen requires a counter-clockwise (CCW) rotation of the yoke and a level shift from the lowest level (1-12) to the next higher level (13-24). In software this is achieved in two steps. First a CCW rotation of the yoke resulting in a step change from twelve back to one and then a level change from the lowest level (1-12) to the next higher level which is a step change from one to thirteen. Hence there are two large step changes first from twelve to one and then from one to thirteen; the result is the annoying glitch heard through the speakers.

Wiper Motion - Rotation of the yoke is counter-clockwise (CCW) from step 1 to 12. There is only a level change from step 12 to 13 and the the yoke rotates clockwise (CW) from step 13 to 24.
To solve this problem I devised something I call “Wiper Motion” as shown in the figure to the right. With wiper motion, the volume change from steps one to twelve requires a counter-clockwise (CCW) rotation of the yoke as before but the volume change from thirteen to 24 now requires a clockwise (CW) rotation of the yoke. As a result, the yoke rotates back and forth in a wiper action as the volume level is changed. The key improvement with wiper motion is that the step change from twelve to thirteen now only requires a single action which is a level change from the lowest level (1-12) to the next highest level.
To implement wiper motion I have modified the design of the original level printed circuit boards to provide an arrangement of resistors appropriate for the clockwise levels. I am waiting for these boards to arrive to confirm (or not) my latest hypothesis about the origin of the twelve to thirteen glitch.